
Hola, estuve reparando los enlaces desde las páginas, por favor reportar si alguno no va bien.
Saludos
Hola, estuve reparando los enlaces desde las páginas, por favor reportar si alguno no va bien.
Saludos
Como ya les había comentado antes, la idea es con partes en común hacer tres tipos de robot con solo cambiar el sensor, hoy vamos a tratar el tema de los sensores, ya he puesto una entrada antes con la forma de construir un sensor para el seguidor de líneas negras sin usar el celebre CNY70, en este caso usamos solo unos led y fototransistores o fotodiodos que obtuvimos de unos mouse viejos, en general tiene 2 o 4 pares de emisor receptor de iR.
Sensor del seguidor de líneas negras
El circuito del seguidor de líneas lo pongo nuevamente, pasado mas prolijo y les comento que es interesante variar con un preset de unos 100k el valor de la resistencia de 15K porque de esa forma se puede encontrar en los distintos tipos de receptores de iR una mayor o menor sensibilidad, podemos colocar el preset e ir variando la resistencia y viendo a cuanta distancia se activa, si prestan atención verán que en este caso la resistencia que usé es de 15K pero en el sensor que se usa en el esquiva muros usé una de 33k, depende del receptor que estemos usando debido a que son materiales reciclados.



Este sensor del sigue líneas negras puede modificarse usando dos diodos iR para activar cada uno por separado el receptor, solo habrá que agregar una resistencia de 470 y un led iR mas como en este caso.



Sensor del esquiva muros
Es sensor del esquiva muros justamente es como les decía antes, usa dos sensores iR separados, buscar la mayor sensibilidad variando la resistencia, en mi caso usé 33k mas o menos a unos 5 cm detecta y frena uno de los motores lo que permite el cambio de dirección del robot. Esta montado en plásticos que saqué de las mismas lectoras de CD que desguacé para los motoreductores.




Se puede hacer un sensor igual para el sigue líneas negras usando el mismo circuito solo que con distinto montaje físico.
Sensor del seguidor de LUZ
El seguidor de luz es el mas simple solo lleva una resistencia de 100k y una fotoresistencia LDR que no la he podido reciclar de ningún lado asi que las compré son muy económicas, necesitaremos 2



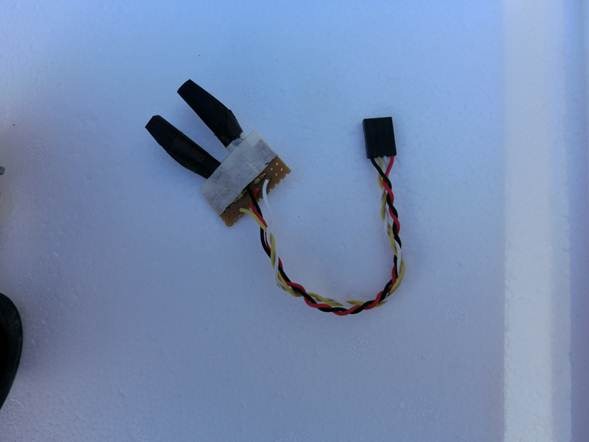
Como habrán visto todos los sensores tienen una ficha de cuatro patas que he recuperado del cableado de los CPU antiguos esto hace que sea muy fácil intercambiar uno u otro sensor, todas las fichas llevan los dos cables del sensor propiamente dicho en la parte central y el positivo y negativo de la alimentación a los costados.
Si hemos visto la entrada de la electrónica de los motores veremos que este lleva una ficha de 4 pines que conecta con estos sensores. 
Los invito a suscribirse y marcar like si les gustó, en una próxima entrega les mostraré en detalle las partes del robot múltiple su ensamble y el funcionamiento con cada sensor.
Las baterías agotadas de las notebooks tienen en su interior varias “celdas” que son un tipo de pilas distintas a las comunes A, AA, o AAA, estas celdas son de uso industrial, las que yo he desarmado tienen una con nomenclatura 18650, y cargadas al máximo tienen una tensión de 4,2 v y varios mA/h . He abierto 3 baterías de notebook y he encontrado que las celdas no están agotadas como uno podría pensar, a pesar que nuestra PC nos diga que ya la batería no sirve, , obviamente las celdas no estarán óptimas, pero para nuestros fines servirán.


El problema más grande que se nos presenta es no puede cargarse con un cargador común, requiern un cargado especial, primero se carga a corriente contante y llegado a determinada tensión, se pasa a tensión constante hasta llegar al valor máximo que son 4,2v y ahí el cargador se detiene solo, es necesario hacerlo de esta forma porque de lo contrario la celda explota no deben pasar de ese valor de 4,2 v son bastante delicadas, en la red hay varios videos donde conectan una de estas celdas directamente a una batería de auto de 12 v y filman la explosión, asi que mucho cuidado con intentar cargar estas baterías con cualquier fuente de DC.

La solución a esto es adquirir un cargador para estas celdas, son muy económicos y hacen todo como debe ser y en un par de horas tenemos una excelente batería que durará mucho tiempo y a costo muy bajo ya que el cargador no supera el valor de dos baterías de 9V de marca líder.


Si la batería de notebook ha estado durante mucho tiempo en desuso puede que las celdas tengan menos de 2.7v y el cargador no quiera cargarlas, será necesario darles un toque por esta única vez con una fuente común de 5 o 6 v DC hasta que la tensión supere ese valor y luego la colocamos en el cargador

Yo uso en mi robot múltiple dos de estas celdas puestas en serie, unos 8,4 v con muy buen resultado.

Bueno es todo, espero les haya gustado, marquen like si les sirvió o gustó y suscríbanse al blog.
Los motores paso a paso son mecanismos de muy alta precisión y repetitividad y se usan mucho, pero necesitan una plaqueta controladora para que los impulsos hagan mover el motor una determinada cantidad de grados en un sentido o en otro. Cuando desguazamos alguna impresora o alguna lectora de CD o DVD nos vamos a encontrar con ellos, con solo mover el rotor nos daremos cuente que este gira como a saltitos, la mas de las veces no podemos usarlos porque requieren de esa electrónica.

Si necesitamos de un motor que sea bastante lento, con pocas vueltas y bastante fuerza podremos usar este tipo de motores pap con un arreglo sencillo.

Hay que buscar un motor con 4 cables de salida, con el tester vamos a identificar las dos bobinas, es decir habrá continuidad entre dos pares de cables. Ahora unimos las dos bobinas uniendo dos cables pertenecientes cada uno a una bobina diferente y allí mismo soldamos un electrolítico de 1000 MF 25v, cada uno de los dos cables que no están unidos los conectamos a un transformador de 12 de alterna y la pata del capacitor que nos queda libre a cualquiera de los otros cables que esta unido a los 12 de alterna, con solo cambiar esa unión por el otro cable cambiará de dirección de giro.


Un video explicativo
En estos días que llegan facturas de luz astronómicas es una buena idea medir el consumo de los electrodomésticos de nuestra casa para ver si están dentro de los consumos esperados y sobre todo ver si hay pérdidas o consumos que podamos evitar, algunas veces el aparato queda conectado a la red y estando apagado sigue consumiendo como es el caso que vamos a ver ahora.

Para poder medir estos consumos será necesario adquirir un instrumento que se llama pinza amperometrica, no son caros esta china por ejemplo cuesta alrededor de los 15 U$A o menos, estas pinzas están diseñadas para uso industrial porque están preparadas para medir altos consumos tienen dos escalas de 200 A y de 1000 amperes, pero les voy a mostrar un truco para poder medir pequeñas corrientes.

Tambien hay otras pinzas que son mas caras, otras analógicas, en todas vamos a poder hacer la medida.
Estos instrumentos lo que miden es la corriente, es decir los amperes, para poder traducirlo a watts o kilowatts que es lo expresa la factura vamos a tener que hacer unos cálculos simple que comentaré al final
La pinza debe abrirse y abrazar uno solo de los cables que alimentan al electrodoméstico, como puede verse acá:


Es conveniente armar el siguiente arreglo para hacer las mediciones


Como les comenté antes estas pinzas chinas están pensadas para usos industriales y si nuestros electrodomésticos tienen consumos bajos o alguna perdida, va a resultar difícil calcular ya que la lectura va a estar dentro del error del propio instrumento, asi que vamos a hacer La siguiente “trampa” vamos a hacer una bobina con cable de 2 mm de 10 vueltas, luego la sujetamos con tres precintos como puede verse acá, y para medir vamos a pasar la pinza por el medio de esta bobina, esto va a resultar en la lectura un incremento x10 asi por ejemplo un foco que consume 0,18 A que con la pinza abrazada solo a un cable nos daría una lectura de 0,1 o 0,2 con la bobina nos dará 1,8 que tiene mucho menos error. Para los cálculos al resultado final lo dividimos por 10.
Vamos a leer el consumo de un televisor plasma, estando encendido y luego en stand by

Ahora vamos a los cálculos, en la factura de luz el consumo viene expresado en Kilowatts, un kilowatt, equivale a 1000 watts y es una unidad de potencia, esta potencia se calcula multiplicando la tensión de la línea, sea 220v o 110v de acuerdo al país, por los amperes que leímos con la pinza amperometrica, recordemos que si medimos con la trampa de 10 vueltas, debemos dividir por 10 el resultado.

Ahora vamos a sacar la cuenta sobre las lecturas que hicimos con el TV plasma, aca en argentina tenemos una tensión de 220v y la corriente nos daba 2,2 A leídos sobre la bobina de 10 vueltas es decir en realidad son 0,22 A entonces 220x 0,22 nos da 48.4 watts que es prácticamente igual a lo que dice la placa que esta pegada en la parte posterior del plasma, que dice que el consumo es de 50 watts. Sin embargo nada dice del consumo del equipo cuando queda enchufado en stand by, ahí tomamos una lectura de 0,3 es decir 0,03 A que por los 220v me da unos 6,6watts por hora, en un día esto es 158 watts y en un mes 4752 watts o sea en nuestra factura de luz son 4,7 KW que estamos consumiendo por solo dejar enchufada la TV.
Asi como hicimos con la TV podemos medir cualquier electrodoméstico de la casa y calcular las perdidas y consumos extras que tenemos.
Bueno eso es todo, espero que les haya gustado, marquen like si les sirvió o gustó y suscribanse al blog.
Como ya les comenté antes, la idea es hacer módulos que sean comunes a tres tipos de robot y con solo cambiar el sensor, tengamos un seguidor de líneas negras, un seguidor de luz o un esquiva muros, ya vimos como armar el módulo de tracción con los motorreductores (ver video) de las viejas lectoras de cd, ahora vamos a hacer un módulo electrónico también común a esos tres robots que es la electrónica que moverá los motores.
La idea de la electrónica la saqué del canal del profe Garcia que recomiendo y ha sido fuente de inspiración para mis alumnos y para mi en encarar estos proyectos de robótica visítenlo que vale la pena, https://www.youtube.com/user/elprofegarcia, como yo no tenía los transistores que el profe recomienda cambié algunos componentes por disponibilidad.
El modulo es muy simple y tiene dos partes exactamente iguales una para cada motor

Es conveniente armarlo primero en el protoboard y luego que este funcionando pasarlo a una plaqueta de proyectos como esta.
Una vez que lo hemos armado y revisado conectamos la batería de 9v, sin colocarle sensores ni motor, los dos leds deben quedar encendidos si todo esta correcto, podemos conectar algún motor a una de las salidas primero y puentear uno de los pines que llevaría el sensor y el led y el motor deben detenerse, igual probamos la otra parte



Como puede verse he usado enchufes reciclados del cableado frontal de un viejo CPU, uno de 4 pines para los sensores (llevan dos cables los sensores y el negativo y positivo de la baterías, otros dos de dos pines para los motores y uno de 2 para la batería.
Para la batería en un próximo video les voy a comentar una manera de reciclar baterías recargables para no tener que usar las 9v que se terminan bastante rápido y son bastante caras, por lo menos en mi país.
Podemos ver acá los tres sensores que soporta este carrito robot,

Aca vemos el sensor del esquiva muros, que también voy a describir en otra entrada con dos juegos de sensores de iR cada uno con un diodo y un fototransistor

El sensor de línea negra, que ya fue descrito aca y en un video con dos fotransistores y un led iR

Este es el sensor del seguidor de luz, aun no tiene puestas las pantallas sobre las fotoresistencias, puede verse bien acá el enchufe con cuatro pines, los de ambos extremos son el negativo y positivo y los dos internos los sensores
Continuará…
El que trabaja con herramientas de corte como amoladoras o tornos de mano, debe ser consiente que tiene que por su bien debe cumplir con ciertas medidas de seguridad, en especial para la vista, es un momento que una esquirla caliente a alta velocidad nos traiga un problema quizás para toda la vida, por lo tanto las gafas de seguridad son algo indispensable.

En mi caso llevo lentes permanentes y la vista está en parte protegida pero tampoco recomiendo usar solo eso, ya he arruinado un par de lentes recetados por este motivo ya que la esquirla sale muy caliente y a tanta velocidad que puede derretir el cristal, mas en el caso de usar los modernos lentes de policarbonato
Les acerco una idea o tips de taller para esos casos que cargamos las herramientas y olvidamos las gafas de protección. Esta simple protección también puede usarse en el laboratorio, cuando trabajamos con reacciones que pueden explotar o proyectar reactivos.

Vamos a usar algo que es muy común en cualquier casa, una botella pet de gaseosa o soda, buscaremos una preferentemente lisa, y la cortaremos de la siguiente manera

Es conveniente que el corte de la parte mas cercana a la tapa de la botella se haga dejando al menos un cm de la parte cónica para que esto ayude a mantener luego la máscara ajustada a la cara sin necesidad de agregar un elástico para sostenerla

La misma elasticidad del material mantiene el plástico sobre la cara, este simple truco no solo preserva nuestra vista también el resto de la cara, el que recibió una esquirla en el labio sabe de que estoy hablando.

El video con los detalles:
Hola, hoy vamos a comenzar a hacer el robot seguidor de líneas, ya les comenté en entrega anterior como hacer el modulo de tracción usando partes de unas lectoras de disco, la idea es hacer dos o tres tipos de de robot usando siempre ese módulo, he conseguido un par de compacteras que tienen unos muy interesantes reductores con varios engranajes lo que hacen que el robot no vaya tan ligero.

Un video con algunas explicaciones de este sensor y el funcionamiento del robot ya terminado
Hoy voy a mostrarles como obtener los sensores y como conectarlos. Casi en todos los robots seguidores de línea que he visto en la red usan un sensor comprado que lleva la denominación CNY70

Como yo estoy en un pueblo rural, bastante alejado, el tener que pedir los sensores a una ciudad o por ebay, significa que me van a tardar mas de un mes en llegar y seguro me van a salir bastante caros, así que a rebuscarse con lo que hay.
Vamos a buscar entre los trastos viejos algún mouse a bola o pueden encontrarse también en alguna vieja disquetera de 5 ¼
En los mouse a bola encontraremos al menos dos juegos de led y fototransistor que formaran nuestro sensor.


Vienen de variadas formas, generalmente el led iR es rectangular de plástico transparente sin color, y el fototransistor puede tener aspectos variados, a veces es un rectángulo de color rojo con dos patas, otras es muy parecido al led con dos patas y plástico transparente otras son rectangulares negros y con tres patas. Como no sabemos como conectarlos empezaremos por ahí.

Primero vamos a conectar el led, al ser un material reciclado no podemos ver cual pata es la mas larga para identificar el positivo, así que lo conectamos en dos vías del protoboard, una de las patas la conectamos a negativo y a la otra conectamos una resistencia de 470 ohms (amarillo violeta marrón), el otro extremo de de la misma va a positivo, le damos tensión con una batería de 9v, como los iR son invisibles a la vista apuntaremos con la cámara digital, el led se verá iluminado color violeta en caso de estar bien las conexiones, si no esta encendido damos vuelta el led y tiene que prender.


Una vez tenemos el led encendido pasamos al fototransistor o fotodiodo, nos tenemos que conseguir una resistencia de 15000 ohms, (marron,verde,naranja) si tiene dos patas lo colocamos en dos vías del protoboard frente al led que conectamos antes, a una pata la ponemos a negativo y a la otra ponemos la resistencia de 15k con su otro extremo a positivo, ahora ponemos el tester en voltios escala de 10v DC con una punta a negativo y la otra a la unión del fototransistor con la resistencia de 15 K colocamos un papel entre el led y el fototransistor y la lectura del tester debe pasar de 1 o 2 voltios a 8 o 9 v, si eso no ocurre damos vuelta el fototransistor y ocurrirá.


Para el sensor usaremos solo un led iR y dos fototransistores montados así.


En la próxima entrega va el circuito que también será un módulo que podrá usarse con diferentes sensores.
En estos días con un grupo de alumnos hemos comenzado a trabajar en un proyecto de robótica, algo bastante simple, unos seguidores de linea y de luz. Como en mi localidad no hay casas donde venden insumos para hobbystas estamos haciendo todo con materiales reciclados.

El primer obstáculo con el que tropezamos fue con los motores con reducción, que es el tema que vamos a tratar ahora.

En los juguetes a pilas y disqueteras es cierto que podemos encontrar diversos motores, algunos de corriente directa y otros paso a paso que requieren una electrónica para que funcionen. Vamos a referirnos a los comunes de corriente continua esos que cuando le ponemos una batería arrancan.

Este tipo de motores sueltos no nos van a servir, debido a tienen muchas revoluciones por minuto pero muy poca fuerza, pero si convertimos esas vueltas en fuerza podremos usarlos con buen resultado, para eso hay que acoplarlos a un sistema reductor que esta formado por varios engranajes. Estos sistemas reductores requieren ser bastante minuciosos si los vamos a armar nosotros mismos y paciencia… como esto no es lo que me sobra busque algo que ya tuviera el motor con el reductor armado.
Hace algunos días estuve por el desguase y me encontré con muchos insumos de informática y me traje varias compacteras, fuentes de PC y disqueteras algunas de 5 ¾ que son una muy buena fuente de donde sacar componentes para utilizar con estos fines.

Vamos a buscar para nuestro robot seguidor dos compacteras iguales de donde sacaremos el reductor.
En general las compacteras tienen dos motores DC que podemos usar, uno es el abre y cierra la bandeja donde se coloca el CD y otro que mueve el cabezal del lector, el que vamos a usar hoy es el de la bandeja.

Para sacarlo vamos a desarmar sacando la caja metálica y quitando las trabas plásticas las plaquetas con la electrónica de la que podemos recuperar solo algunas pocas cosas, interruptores varios, algunos conectores y leds

Dejamos al descubierto la zona donde se encuentra el motor que abre la lectora de CD

como vemos hay una correa de goma que actua sobre una serie de engranajes, vamos a cortar con el torno de mano todo el conjunto, generalmente es plástico aunque hay algunas compacteras mas viejas que traen todo metálico, una vez que lo cortamos nos queda esto, que es el motor con el motoreductor armado.

Como les comenté anteriormente es necesario que los dos juegos de engranajes para ambas ruedas del robot sean iguales.
Para montarlos usaremos una tabla de madera de unos 7 cm por 15 cm y nos debe quedar el engranaje mas grande mirando hacia fuera, por lo que indefectiblemente deberemos colocar los motores hacia uno y otro lado de la tabla, por ese motivo necesitaremos invertir la polaridad de uno de ellos, si no cada motor va a girar en sentido contrario. En los engranajes mas grandes se suelda con la pistola de plástico una rueda de juguete, quedando el módulo de tracción listo para el robot.
Para mas detalles pueden ver el siguiente video donde esta explicado con detalle todo el proceso.

{kind=link}