
Como ya les había comentado antes, la idea es con partes en común hacer tres tipos de robot con solo cambiar el sensor, hoy vamos a tratar el tema de los sensores, ya he puesto una entrada antes con la forma de construir un sensor para el seguidor de líneas negras sin usar el celebre CNY70, en este caso usamos solo unos led y fototransistores o fotodiodos que obtuvimos de unos mouse viejos, en general tiene 2 o 4 pares de emisor receptor de iR.
Sensor del seguidor de líneas negras
El circuito del seguidor de líneas lo pongo nuevamente, pasado mas prolijo y les comento que es interesante variar con un preset de unos 100k el valor de la resistencia de 15K porque de esa forma se puede encontrar en los distintos tipos de receptores de iR una mayor o menor sensibilidad, podemos colocar el preset e ir variando la resistencia y viendo a cuanta distancia se activa, si prestan atención verán que en este caso la resistencia que usé es de 15K pero en el sensor que se usa en el esquiva muros usé una de 33k, depende del receptor que estemos usando debido a que son materiales reciclados.



Este sensor del sigue líneas negras puede modificarse usando dos diodos iR para activar cada uno por separado el receptor, solo habrá que agregar una resistencia de 470 y un led iR mas como en este caso.



Sensor del esquiva muros
Es sensor del esquiva muros justamente es como les decía antes, usa dos sensores iR separados, buscar la mayor sensibilidad variando la resistencia, en mi caso usé 33k mas o menos a unos 5 cm detecta y frena uno de los motores lo que permite el cambio de dirección del robot. Esta montado en plásticos que saqué de las mismas lectoras de CD que desguacé para los motoreductores.




Se puede hacer un sensor igual para el sigue líneas negras usando el mismo circuito solo que con distinto montaje físico.
Sensor del seguidor de LUZ
El seguidor de luz es el mas simple solo lleva una resistencia de 100k y una fotoresistencia LDR que no la he podido reciclar de ningún lado asi que las compré son muy económicas, necesitaremos 2



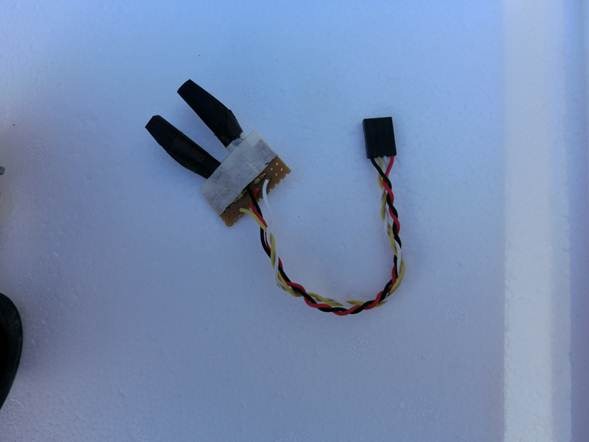
Como habrán visto todos los sensores tienen una ficha de cuatro patas que he recuperado del cableado de los CPU antiguos esto hace que sea muy fácil intercambiar uno u otro sensor, todas las fichas llevan los dos cables del sensor propiamente dicho en la parte central y el positivo y negativo de la alimentación a los costados.
Si hemos visto la entrada de la electrónica de los motores veremos que este lleva una ficha de 4 pines que conecta con estos sensores. 
Los invito a suscribirse y marcar like si les gustó, en una próxima entrega les mostraré en detalle las partes del robot múltiple su ensamble y el funcionamiento con cada sensor.

{kind=link}
Pingback: Robot multiple reciclado muy fácil. Demo | Espacio de César